インパルス型超広帯域無線(IR-UWB)を用いて自律走行ロボットを簡便に自律走行させるシステムの開発に成功: 画像一覧(2)



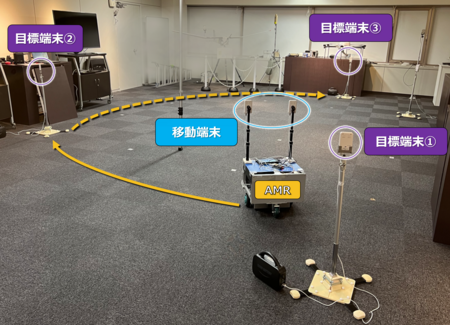
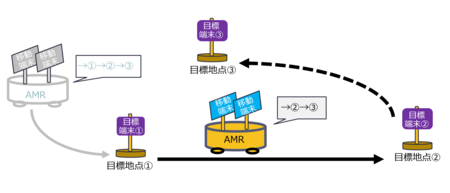
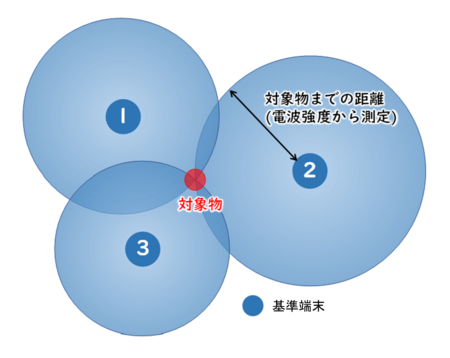

図1 AMR動作検証実験の様子 図2 AMRが複数の目標地点に連続で自律走行するイメージ図 図3 3点測位の原理