宇宙戦略基金事業(第二期)「月面インフラ構築に資する要素技術」に連携機関として採択



電子ビームレゴリス凝固技術及び月面移動作業ロボットシステムの開発
白山工業株式会社(本社:東京都府中市、代表取締役社長:吉田 稔、https://www.hakusan.co.jp/)は国立研究開発法人宇宙航空研究開発機構(JAXA)が公募する「宇宙戦略基金事業・探査等(第二期)」(※1)において、国立大学法人東北大学 吉田和哉 特任教授を研究代表者とする技術開発テーマ「月面インフラ構築に資する要素技術」のプロジェクトに連携機関として採択されました(課題名:「電子ビームレゴリス凝固技術及び月面移動作業ロボットシステムの開発」)。
近年、月面における持続的な活動拠点の構築に向けて、各国の宇宙機関や民間企業による探査計画が急速に進展しています。将来の月面活動においては、着陸・移動・居住を支えるインフラの整備が不可欠ですが、その実現における最大の課題の一つは、資材を地球から輸送する際の極めて高いコストです。この課題を解決するためには、月面に広く存在するレゴリスをその場で資材として利用し、構造物を構築する技術の確立が重要となります。
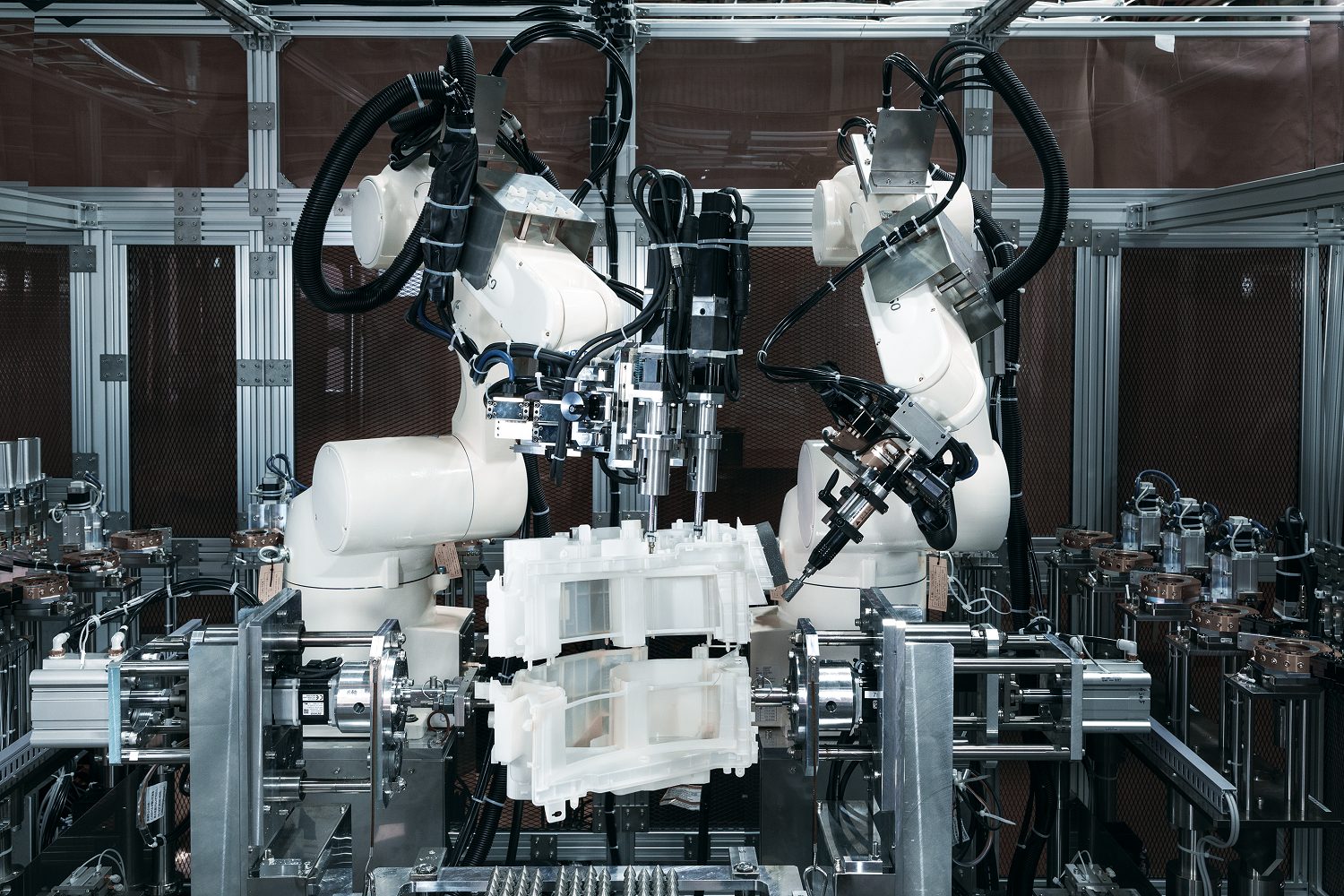
本プロジェクトでは、電子ビームを用いてレゴリスを溶融・凝固させることで、月面上で構造資材を生成可能であることを実証し、着陸パッドや走行路等のインフラを現地で直接形成するための基盤技術の確立を目指します。さらに、この施工を担う多機能な月面移動作業ロボット(図1参照)を開発し、実環境を想定した条件下での施工技術の実証を行うことで、月面拠点建設に必要となる技術体系の確立に取り組みます。

[図1:本プロジェクトで開発する月面ロボットの計画図] 左が格納状態、右が展開状態
本プロジェクトの推進にあたっては、これまでGoogle Lunar XPRIZE(※2)においてチームHAKUTOを技術的に牽引し、また近年ではムーンショット型研究開発プロジェクト目標3(※3)においてプロジェクトマネージャーを務めてきた国立大学法人 東北大学 吉田和哉 特任教授を研究代表者とし、白山工業のほか、株式会社Space Quarters、株式会社システム計画研究所、株式会社JAOPS、アステリアART合同会社の産学連携チームにより技術開発を実施します。
白山工業は、極限環境におけるロボット・センサ技術の開発を強みとしており、廃炉作業等に用いられるロボットの実用化実績を有しています。また、ムーンショット型研究開発事業においては、東北大学が進める変幻自在AIロボットの開発プロジェクトに参画してきました。現在は、アルテミス計画においてJAXAが担当する有人与圧ローバーに搭載されるロボットアームの検討を進めています。これらの技術と経験を活かし、本事業では小型輸送機で運搬可能な展開型移動作業ロボットのハードウェア開発を担当します。革新的な軽量高出力機構とセンサ系の導入等を進め、月面開発における日本の国際競争力向上に貢献して参ります。
(※1) 宇宙戦略基金は、宇宙航空研究開発機構(JAXA)に設置され、民間企業や大学等による宇宙分野の先端技術開発、技術実証、商業化を複数年度にわたり支援する制度です。日本の宇宙産業の市場規模を2030年代早期に8兆円に倍増させる等の政府目標に向けた、重要な事業の一つです。
■ 「宇宙戦略基金事業」の紹介ページ
(※2) Google Lunar XPRIZE(グーグル・ルナ・エックスプライズ、略称GLXP)は、米国Xプライズ財団がGoogle社を冠スポンサーとして開催した、民間による世界初の月面無人探査を競うコンテストで、2007年から2018年にかけて実施された。世界各国から34チームが参加登録した。HAKUTOは日本から参加した唯一のチームで、東北大学 吉田和哉 教授が技術リーダーとして牽引。同チームは2015年1月に発表されたマイルストーン賞で月面移動サブシステム中間賞を受賞している。
■ 「Google Lunar XPRIZE」の紹介ページ
https://www.xprize.org/competitions/google-lunar
■ 「月面探査チーム HAKUTO」の紹介ページ
https://web.archive.org/web/20180802215003/http://team-hakuto.jp/
(※3) ムーンショット型研究開発プロジェクト目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」において、東北大学 吉田和哉 教授が研究代表者(プロジェクトマネージャー)として提案した研究開発課題「月面探査/拠点構築のための自己再生型AIロボット」が2022年度に採択され、2025年度までの4年間にわたって複数の異種形態のロボット群からなる自己修復/自己成長型の「変幻自在」なAIロボットシステムの研究開発が実施された。開発されたロボットシステム「MoonBot(ムーンボット)」は、JAXA相模原キャンパス宇宙探査実験棟、および欧州宇宙機構(ESA)とドイツ航空宇宙センター(DLR)が共同運営するLUNA(ルナ)施設(ドイツ・ケルン)等の本格的な月面環境模擬実験設備にて地上実証実験を積み上げ、2025年夏には大阪・関西万博において動態展示された。
■ 「ムーンショット型研究開発プロジェクト目標3(研究公式サイト)」の紹介ページ
https://srl-moonshot.mech.tohoku.ac.jp/
■ 「国立研究開発法人科学技術振興機構(事業概要/JST)」の紹介ページ
https://www.jst.go.jp/moonshot/program/goal3/3B_yoshida.html
-
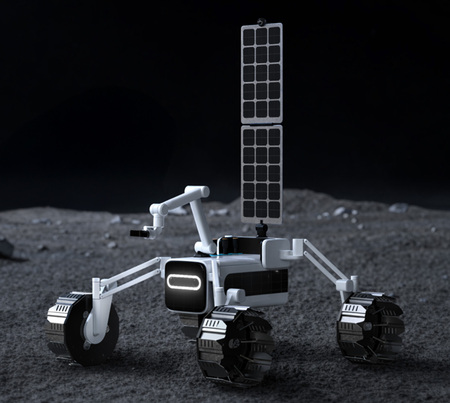
月面ロボットの計画図_展開状態 -
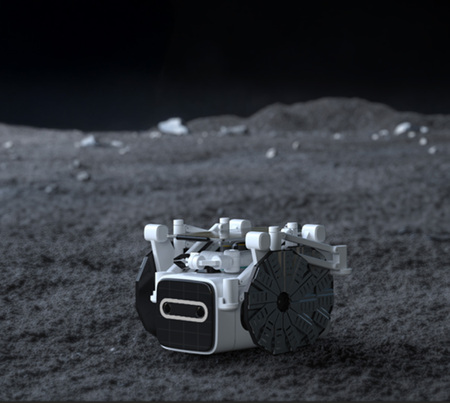
月面ロボットの計画図_格納状態 -

HERO Lab.ロゴ